WS04E
WS04Eは赤発光
WS04M,WS04Eは反射光の強さを調べるセンサです。 サッカーチャレンジで緑色の床に引かれた白線の検出に使います。
一般の反射光センサは、現在の反射光の強さに応じて信号を出力します。 走りながら白線を横切るときは センサの値を調べる時間間隔が長いと白線を見逃すことがあります。 そうならないために、時間のかかる命令を避けるプログラムにしたり、 マイコンの割り込み機能を使ったりハードウエア処理するなど知識がいる対策があります。
このような対策ができる人はそれに挑戦しましょう。
でも、それらの対策が難しい場合はこのセンサを使いましょう。
WS04M,WS04Eは白線を検出するとその信号を一定時間延長して出力するため見逃しを減らすことができる
デジタル出力反射光センサです。
| WS04M WS04E |
|
WS04Mはマゼンタ発光 WS04Eは赤発光 |
教材ロボットでは、センサを調べる命令を実行するとセンサの状態を読みます。 それ以外の時間のかかる命令がつながっていると、その間に白線を過ぎてしまうことがあります。 時間のかかる命令があっても、その直後に白線を検出したことがわかれば見逃しがなくせます。
 白線を走って通過する時の出力を示しています。
①はWS04G/Rアナログ出力のもの。②がWS04M/Eのデジタルで時間を延長する出力のもの。
白線を走って通過する時の出力を示しています。
①はWS04G/Rアナログ出力のもの。②がWS04M/Eのデジタルで時間を延長する出力のもの。
 出力信号を測定したものです。左から右に時間、下から上に出力値が0%から100%
出力信号を測定したものです。左から右に時間、下から上に出力値が0%から100%
デジタル出力なので白線で四角い波形の信号が出ます。
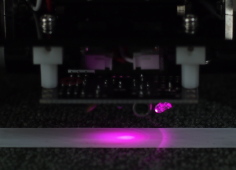 WS04Mの動作時の写真
WS04Mの動作時の写真
発光はマゼンタ色。少し紫色がかったピンク色です。
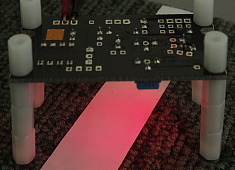
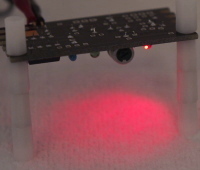 WS04Eの動作時の写真
WS04Eの動作時の写真
発光は赤色、光が広い範囲にとどくように散光型です。
 発光色について
発光色について
サッカーチャレンジで、緑色の床に引いた白線を調べます。
これは光の3原色の図です。白い物は赤,緑,青 どの光もよく反射します。
緑色の物が緑色に見えるのは、それが緑の光だけをよく反射し、その他の色を吸収するからです。
緑と白の反射の違いが大きくなるように、緑以外の光で調べるとよいことになります。
発光色は 赤,マゼンタ,青 が適します。
白の光から緑の光を取り除くとマゼンタの光になります。
緑とマゼンタの関係を補色といいます。
端子P1,P2は、組み込み方に合わせて、電線をはんだづけするか、 取り付け場所に合う 2.5mmまたは2.54mmピッチのコネクタを付けてください。 コネクタは製品に含みません。


 自分で組み立てる場合の受発光素子の取り付け例です。
自分で組み立てる場合の受発光素子の取り付け例です。 ◆改良のため回路が変わることがあります
◆改良のため回路が変わることがあります WS04M,WS04EのLEDは目ではわかりませんが600Hzで点滅しています。
WS04M,WS04EのLEDは目ではわかりませんが600Hzで点滅しています。 WS04M,WS04Eを2個以上使い、光を当てる範囲が重なるときには、
それぞれの発光期間を同時にしないと他の光の影響で正しく働きません。
WS04M,WS04Eを2個以上使い、光を当てる範囲が重なるときには、
それぞれの発光期間を同時にしないと他の光の影響で正しく働きません。
WS05を使い、発光受光素子を引き出し配線しました。
こうすると、せまい場所でも付けられます。

引き出したLEDの光を離れた場所から受光素子に当てます。
こうすると、間に光を通さない物体が通れば検知します。これをフォトインタラプタといいます。