WS04Gは緑発光
◆改良のため基板や部品の形状が変わることがあります
ロボカップジュニア・レスキューチャレンジでライントレースに使う反射光センサや、 サッカーチャレンジで白線検出に使う反射光センサは、 反射物まで1cm以内の近距離用の物が多くありますが、 応用を広げるために、より離れた物体にも使えるアナログ電圧出力の反射光センサを開発しました。
| WS04R WS04W |
 |
WS04Rは赤発光 WS04Wは白発光 |
WS04Gは、1~10cm程度離れた物体の反射光の強さを調べるセンサです。
機能的にはWS01Rと同じです。
WS04R,WS04Wは、照射を広角度にし、1~5cm程度離れた物体の反射光の強さを調べるセンサです。
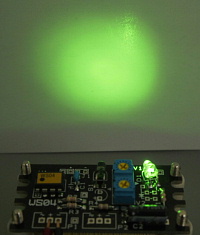
WS04GのLEDは緑色、光が遠くまでとどくように集光型です。
ライントレースやサッカーの黒線検出に使います。
なぜ緑色?
受光に使っているフォトトランジスタの分光特性(色の違いによる感度の違い)
は人間の目の特性に近くできています。
最も感度が高いのが黄緑色の波長です。
感度を高めるためにそれに近い色の発光にしています。
WS04RのLEDは赤色、光が広い範囲にとどくように散光型です。
なぜ赤色?
サッカーチャレンジで、床に引かれた白線を調べることを目的にしています。
床はルールで緑色とされています。緑色は人間の目で判断します。 人間の目は光の3原色である 赤,緑,青 を感じて、この3原色の混ざる割合で色を感じます。 白い物は、赤,緑,青をどれもよく反射します。 緑色の物は、緑の光だけをよく反射し、その他の色を吸収するから緑色に見えます。 赤を使うと、白は赤をよく反射し、緑は赤を吸収するので、緑と白の違いがわかります。

WS04Wの光源LEDは白色です。
図の左はふつうの照明や白色光で見たレスキューチャレンジの交差点です。 緑や赤の光源での反射光は中,右のようになります。 緑の光源では緑色は白に近い反射に、赤の光源では緑色は黒に近い反射になります。 光源色を使い分けると緑マーカーを見たり見なくしたりできます。
端子P1,P2は、組み込み方に合わせて、電線をはんだづけするか、 取り付け場所に合う 2.5mmまたは2.54mmピッチのコネクタを付けてください。 コネクタは製品に含みません。


 自分ではんだづけする場合の受発光素子の取り付け例です。
自分ではんだづけする場合の受発光素子の取り付け例です。 ◆改良のため回路が変わることがあります
◆改良のため回路が変わることがあります WS04G,WS04R,WS04WのLEDは目ではわかりませんが600Hzで点滅しています。
WS04G,WS04R,WS04WのLEDは目ではわかりませんが600Hzで点滅しています。 WS04G,WS04R,WS04Wを2個以上使い、光を当てる範囲が重なるときには、
それぞれの発光期間を同時にしないと他の光の影響で正しく働きません。
WS04G,WS04R,WS04Wを2個以上使い、光を当てる範囲が重なるときには、
それぞれの発光期間を同時にしないと他の光の影響で正しく働きません。
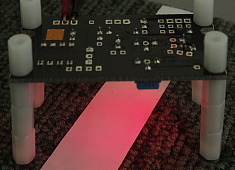
WS05を使い、発光受光素子を引き出し配線しました。
こうすると、せまい場所でも付けられます。

引き出したLEDの光を離れた場所から受光素子に当てます。
こうすると、間に光を通さない物体が通れば検知します。これをフォトインタラプタといいます。
ロボットを使う技術教育の中で、電子回路や電子工作の教材にご利用ください。
適度な部品点数ですので、はんだづけを含む基板製作の材料にも適します。実用的でもあります。
発光素子、受光素子が基板上にあり、信号を観測できます。
パルス発光させていますので、オシロスコープが適しています。
最近低価格で手に入る低速のオシロでも十分観測できます。
LEDにかかる電圧を見たり、
受光電圧を見て、反射があるときとないとき、懐中電灯などの光を当てた時の振る舞いを観測すれば
回路の理解が深まります。