ロボカップジュニア・サッカーチャレンジのルールでパルス発光ボールが規定され
競技で採用されています。
このボールの特徴は、電池の寿命が長くなり、
対応するボールセンサと組み合わせると外光の影響を受けにくくなることです。
和歌山ノードでは、パルス光ボールに対応するため、
アナログ入力を持ったロボットに使うことを目的にボールセンサを開発しました。
![[WS02H写真]](WS02H_Photo7.jpg)
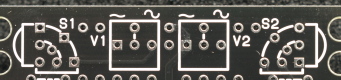 使い方に合わせて受光器S1,S2を取り付けてください。
写真のように受光器S1,S2の取り付け位置は各々、正面、左右45°左右90°から選べます。
使い方に合わせて受光器S1,S2を取り付けてください。
写真のように受光器S1,S2の取り付け位置は各々、正面、左右45°左右90°から選べます。電源と信号出力を接続してください。 端子のピン配置はTJ3と同じです。端子から供給する電源は基板内でつながっています。
半固定抵抗は各回路の信号出力の振幅調整です。時計方向に回すと振幅が大きくなります。 パルス光ボールを近づけて感度を調整します。 電源が5Vの時はボールを最も近づけた状態で信号出力が4.0V~4.5V(80%~90%)になるように調整します。
赤外リモコン受光ICは、赤外光を受けて
太陽光や照明光を取り除いたPWM(パルス幅変調)信号に変換します。
このPWM信号は、サブキャリアと変調信号からできています。
これをサブキャリアを取り除くローパスフィルタ(LPF)に通すと、変調信号が得られます。
LPFは、直流の変調信号を通し、高い周波数のサブキャリアを通さない回路です。
 ◆グラフは代表的な特性をあらわしています。
ボールの角度や電池残量、周囲の状況、センサの個体差 などによって変わります
◆グラフは代表的な特性をあらわしています。
ボールの角度や電池残量、周囲の状況、センサの個体差 などによって変わります図はボールまでの距離によるパルス光センサの反応を測定したものです。
距離に応じた出力が得られています。
至近距離では飽和しやすい傾向があります。
これは、アンプの飽和ではなく、パルス発光は段階的な変調になっているので、
最も弱い発光を感知できる距離より近づいてもパルス幅が変化しないことによるものです。
(近距離での反応は、PAMとPWMを併用した半固定ゲイン方式のWS03Wが優れています。)
ボールが遠いときや隠れている時でも、キャリアを受信しているので、電圧が出ます。
利用する時は、取り付けた状態で、離れた位置にあるボールを受光させてみて、
その電圧以下ではボールが見えていないと判断させるプログラムにすると良いでしょう。
遮光をし過ぎないで、常にキャリアを受信させておくと
受光IC内部のAGC(自動ゲイン制御)が安定します。
 ◆グラフは代表的な特性をあらわしています。
ボールの角度や電池残量、周囲の状況、センサの個体差 などによって変わります。
◆グラフは代表的な特性をあらわしています。
ボールの角度や電池残量、周囲の状況、センサの個体差 などによって変わります。図は受光器を90°に取り付けたときの受光角度に対するパルス光センサの反応を測定したものです。
受光器が向いている方向(左右45°)が最も大きな値になり
そこから角度が離れると角度により値が小さくなります。
左右の値を比較することで、ボールがどの方向にあるかがわかります。
また、このセンサを背中合わせに2つ付けて、受光器が90°の間隔で4つになるようにすると
360°の範囲でボールの方向を知ることも可能になります。