関連する2つのセンサの信号を合成して1つの信号にすると、
制御のアナログ入力を節約したりプログラムを効率化できる場合があります。
WR01Dは、2つの電圧信号の差を出力する回路を搭載した基板です。
ボールセンサの左右の値の差によってボールの方向を判断したり、 ラインセンサの左右の値の差によってライントレースで進む方向を決めたり、 2つのセンサ値の差によって制御するよう回路を構成できます。
WR01D
P1∼P4はコネクタを付けていません。電線を直接はんだづけするか、 取り付け場所に合う 2.5mmまたは2.54mmピッチのコネクタを付けてください。
 ◆改良のため回路が変わることがあります
◆改良のため回路が変わることがあります
設定入力の、端子1-2間を
開放(何もつながない状態)で、2つの入力の差の1/2の電圧 (X-Y)/2 を出力
短絡(導線でつないだ状態)で、2つの入力の差の電圧 (X-Y) を出力
します。
(X-Y)/2 は結果が電源電圧を超えることはありませんが、振幅が半分になります。
(X-Y) は振幅が入力と同じですが、2つの入力が大きいと飽和することがあります。
入力は電源電圧の範囲内にしてください。出力は電源電圧を超えません。
P1,P2,P3,P4のどれかに電源を接続します。 端子の電源は基板内でつながっています。これを利用してセンサへ電源を供給できます。
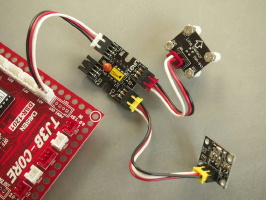
2個のセンサをつなぐ例です。コネクタとケーブルを使い接続しています。
2つのセンサの値を合成して1つのアナログ入力につながります。