中級ロボット教室で使うロボットの組み立て方法です。
TJ3Bはロボット組み立てキットになっています。家に持ち帰って組み立ててください。 初心者でも組み立てやプログラムができるようにくふうされています。 組み立ては通常2~3時間程度で、ニッパーとプラスドライバーをご用意ください。 YouTubeに組み立て動画があります。 メーカの製品紹介HP
また、大阪日本橋にある本製品のメーカで
申し込めば参加できる講習会がありますので利用してください。
プログラムの作成、転送にWindowsパソコンを使います。
もしわからない時は、次回のロボット教室か、桐蔭高校科学部で指導できます。
今回のロボット教室では標準のボールセンサは付属していません。 これに代わってパルスボールセンサ2個が付属してあり追加で取り付けます。 標準の組み立てのあと、以下の中級向けセンサの追加をしてください。
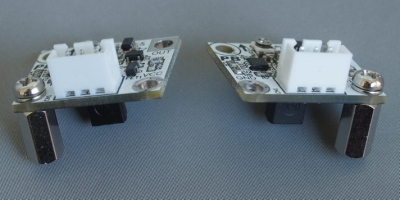
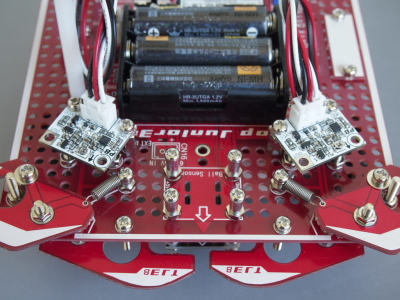
ボールセンサ基板のコネクタの横の取り付け穴にスペーサを付けます。
左右反対の位置に1本ずつ付けます。
このスペーサはセンサ基板に固定するだけでロボット本体には固定しません。
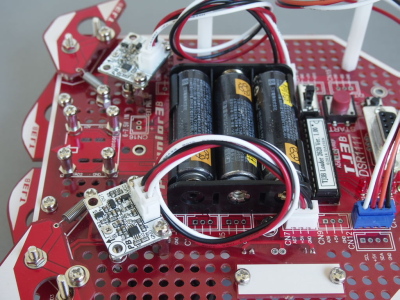
裏からねじ止めするために、いったんモーターボードを取りはずしてから作業してください。
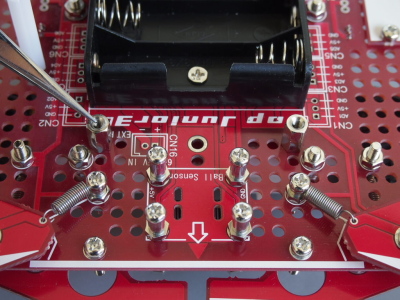
写真のピンセットで指し示す位置にスペーサを付けます。
左右反対の位置にも合わせて2本付けます。
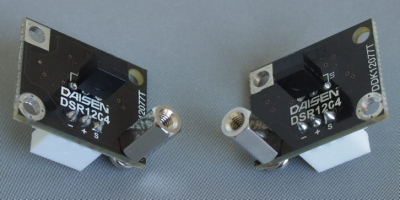
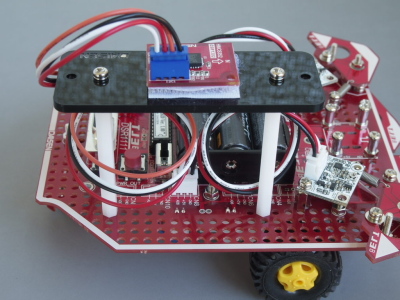
本体に取り付けたスペーサにセンサ基板をねじ止めします。
センサ基板は30°~45°外側に向けて斜めに固定します。
こうすることでボールが自分の右にあるか左にあるか正面かわかるようにできます。
この次の地磁気センサを取り付けた後で配線します。
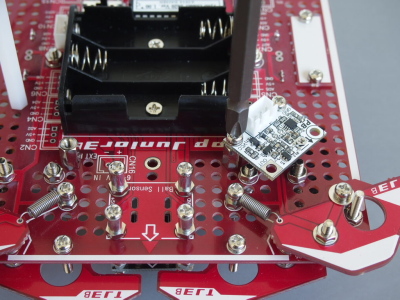
地磁気センサとその取り付け台を写真のように付けます。
マジックテープはセンサの方向を変えて方位を調整するためです。
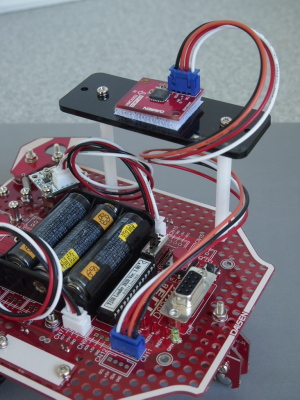
最後に、取りはずしたモーターボードを取り付け、配線をします。
自分で組み立てたロボットで、タッチセンサがうまく動かないロボットがあります。
組立説明書をよく読んで組み立てましょう。
タッチセンサの動きを、目で見るのと、センサーモニターで見るのと両方で確かめましょう。
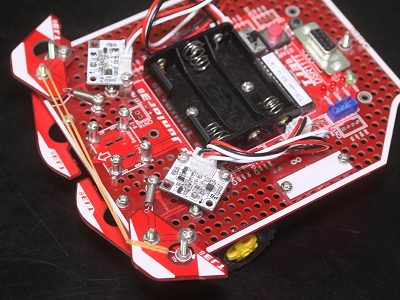
試合中にセンサが反応し過ぎるのを防ぐために、写真のように輪ゴムで引っぱる方法があります。