定常光ボールが発する光は一定の強さです。
フォトダイオードで光の強さを電流に変換します。 定常光モードの時には、フォトダイオードの信号を増幅して電圧信号で出力します。 半固定抵抗で振幅を調整できます。
至近距離でも飽和しにくくするため、出力が大きいときにゲインを低くする2段ゲインアンプにしています。
ロボカップジュニア・サッカーチャレンジのルールでパルス発光ボールが規定されています。 従来の定常光ボールは外光の影響が問題でしたが、パルス光は 対応するボールセンサと組み合わせると、外光の影響を受けにくくなります。
和歌山ノードでは、パルス光ボールに対応するためのボールセンサを開発しています。 WS03Wは、アナログ入力を持ったロボットに使うことを目的に作られた、 定常光モードとパルス光モードに切り換えで対応できるボールセンサです。
WS03W
端子のピン配置はTJ3と同じです。電線を直接ハンダ付けするか、 取り付け場所に合う 2.5mmまたは2.54mmピッチのコネクタを付けてください。
定常光モード
定常光ボールが発する光は一定の強さです。
フォトダイオードで光の強さを電流に変換します。
定常光モードの時には、フォトダイオードの信号を増幅して電圧信号で出力します。
半固定抵抗で振幅を調整できます。
至近距離でも飽和しにくくするため、出力が大きいときにゲインを低くする2段ゲインアンプにしています。
WS03Wのパルス光モードは受光に高速フォトダイオードを使った半固定ゲイン方式です。
一方、受光に赤外線リモコン受光ICを使う自動ゲイン制御(AGC)方式もあります。
リモコン受光ICにはAGC回路が内蔵されており、受光の強さによって自動的に感度を調節します。
そのため、ボールから受けた光の強弱によるセンサ出力の変化が小さい特徴があります。
半固定ゲイン方式は半固定抵抗で設定した一定の感度で働きます。
そのため今までの定常光ボールセンサと同じように、ボールからの光の強さに敏感に反応し、
ボールが近い時は出力が大きく、遠いときは出力が小さくなります。
そのためAGC方式に比べて至近距離でのボールまでの距離がわかりやすくなります。
J1を開放にするとパルス光モードになり、短絡すると定常光モードになります。
モードは電源を入れた時に切り換わり、電源を入れ直すまではJ1を変えてもモードは切り換わりません。
 ボールまでの距離による定常光センサの反応をグラフにしたものです。
ボールまでの距離による定常光センサの反応をグラフにしたものです。 ボールまでの距離によるパルス光センサの反応をグラフにしたものです。
ボールまでの距離によるパルス光センサの反応をグラフにしたものです。 WS03Wをダイセン電子のOJ2に取り付けて、これで回り込みの実験。
WS03Wをダイセン電子のOJ2に取り付けて、これで回り込みの実験。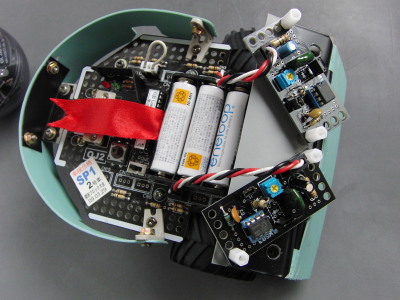 2個のWS03Wを角度を付けてダイセン電子のOJ2に取り付け、これでシュートの実験。
2個のWS03Wを角度を付けてダイセン電子のOJ2に取り付け、これでシュートの実験。